
Flow with the Force Field: Learning 3D Compliant Flow Matching Policies from Force and Demonstration-Guided Simulation Data
ICRA 2026
Workshop on Contact and Impact-aware Manipulation, IROS 2025
Workshop on Exploring the Role of Energy in Robot Learning and Control, IROS 2025
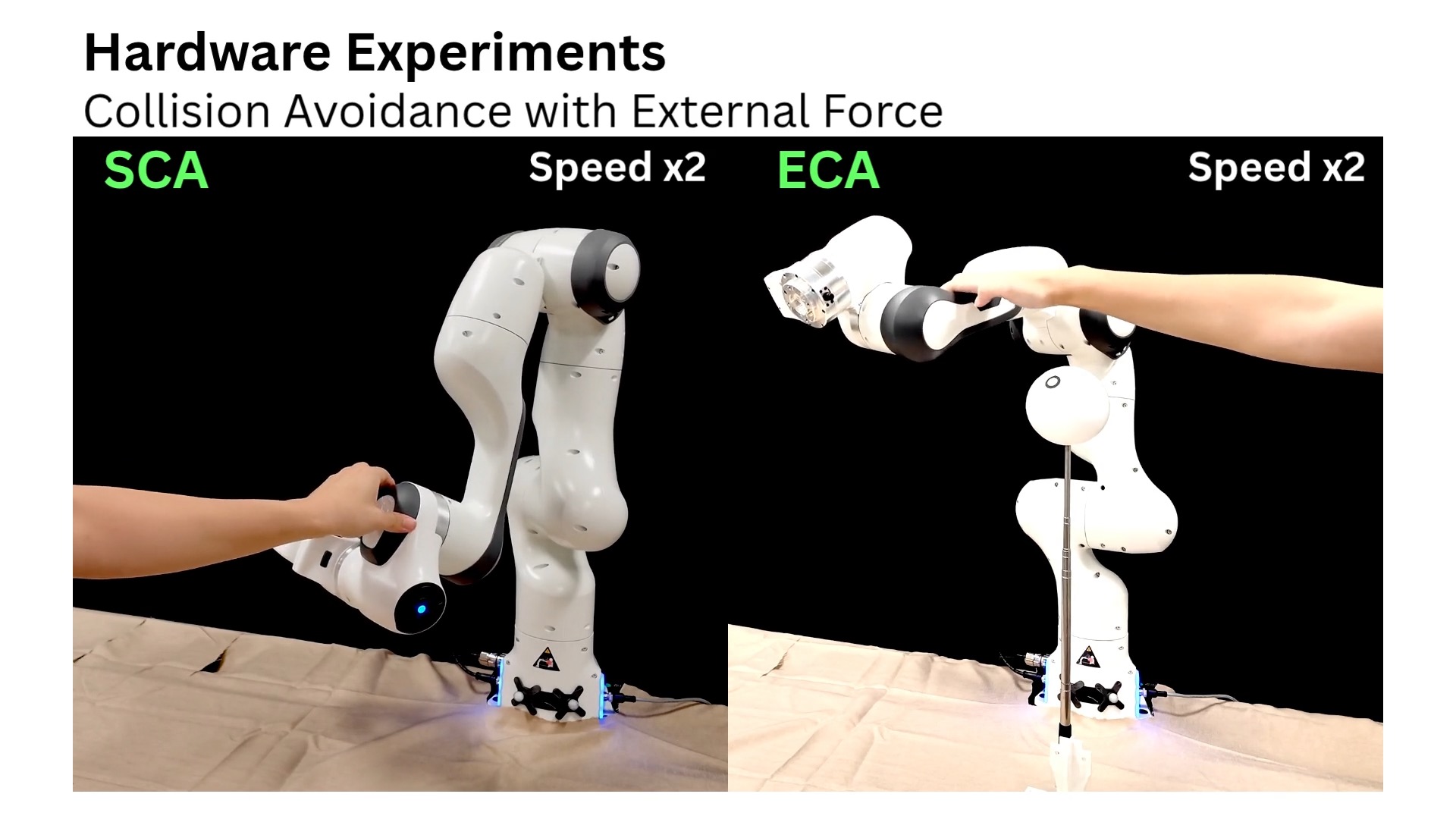
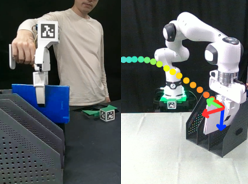
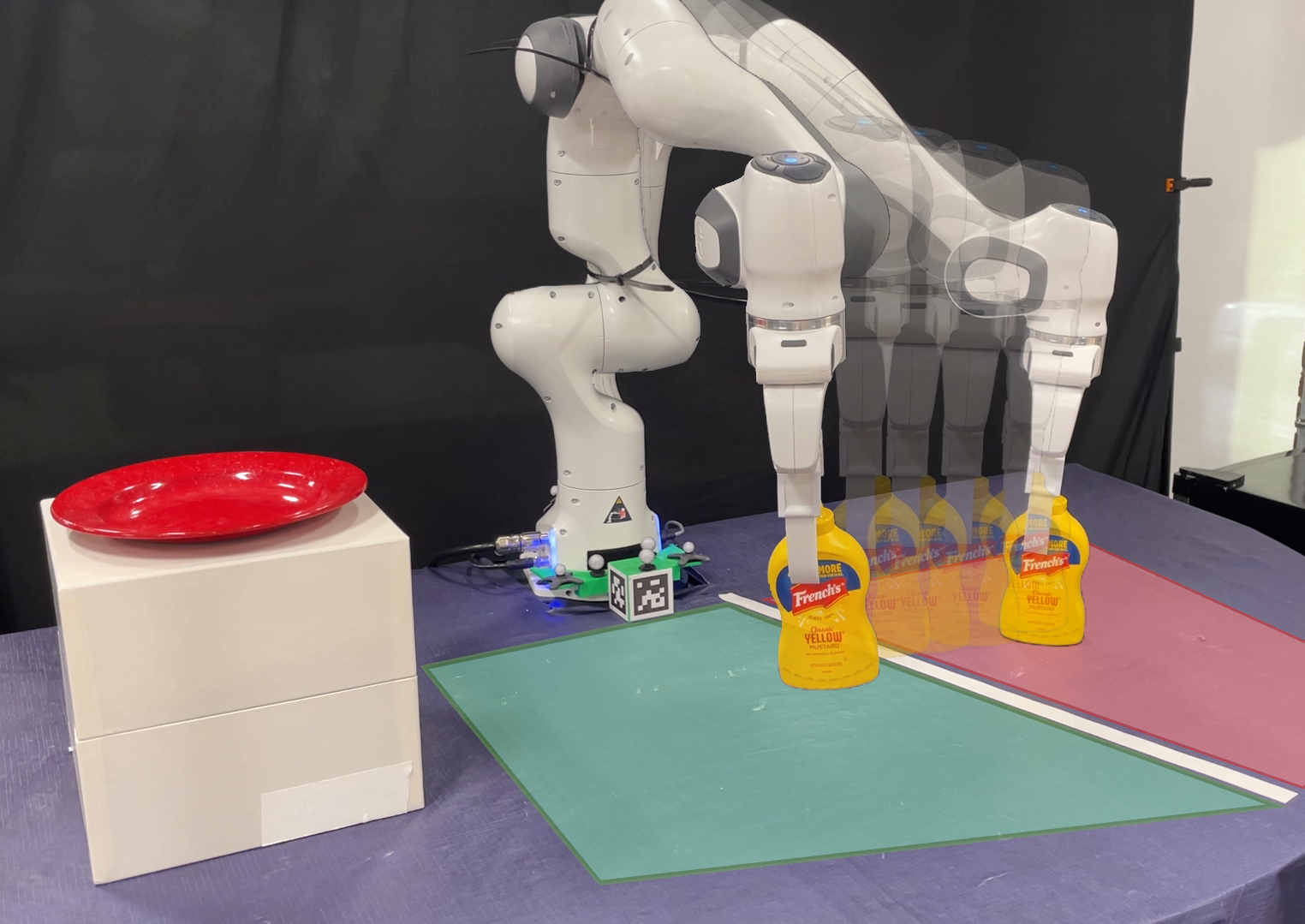
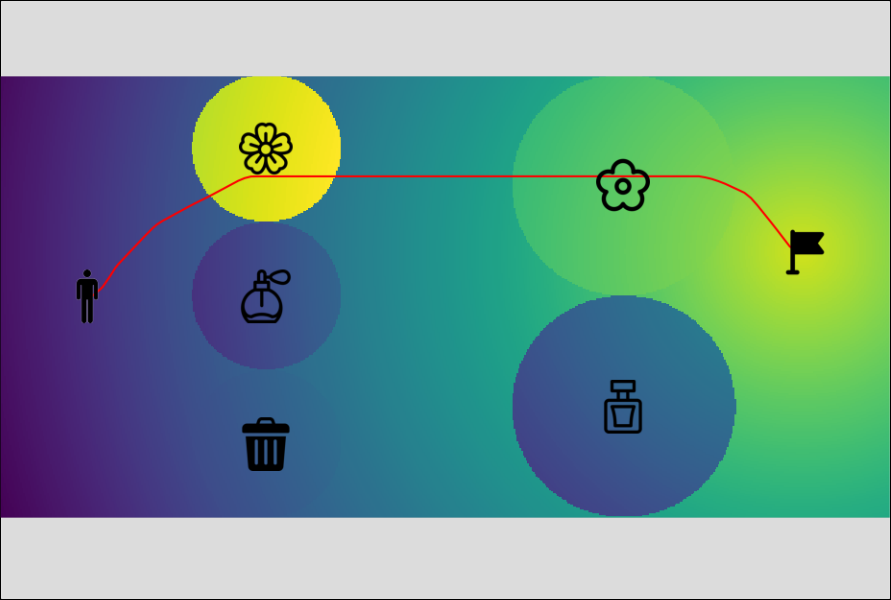
We introduce a framework for generating force-informed data in simulation, instantiated by a single human demonstration, and show how coupling with a compliant policy improves the performance of a visuomotor policy learned from synthetic data.